RealTime-SAM2-Tracker-Camera
소개
본 프로젝트는 2024 서울대학교 LnL의 “뇌과학으로 바라보는 인공지능” 학생자율세미나에서 진행된 팀 프로젝트로,
Meta의 Segment Anything Model 2 (SAM2) 를 활용해 다음 기능을 구현하는 것이 목표였습니다.
- 프롬프트(마우스 클릭) 기반 객체 분할: 사용자가 웹캠 화면에서 특정 물체를 클릭하면, SAM2가 물체의 세그먼트 마스크를 예측
- 실시간 추적(Tracking) & 웹캠 자동 제어: 예측된 마스크의 중심과 화면 중앙을 비교하여, 서보모터 2축(Joint1, Joint2)을 제어
- 확장성: Prompt만으로 다양한 물체를 곧바로 추적 가능
기간 / 인원, 역할
- 진행 기간: 2024년 (2 학기 중)
- 팀 인원: 3명
- 본인: 코드 제작 및 모터 제어 코드 작성
- 팀원1: SAM2 논문 조사 및 보고서 작성
- 팀원2: Webcam 3D 모델링 및 브래킷 3D 프린팅
1. 선행연구 및 관련 이론 탐구
-
SAM (Segment Anything Model)
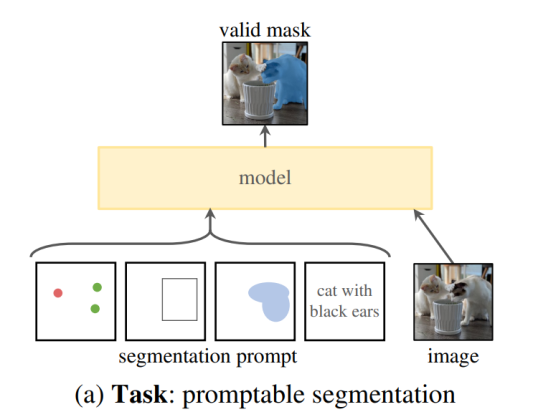
- 이미지 영역에서 다양한 prompt(Point, Box, Mask, Text 등)에 대응하여 zero-shot segmentation이 가능합니다.
- 기본 구조:
1) Image Encoder (MAE, ViT 기반)
2) Prompt Encoder (positional encoding, CLIP 임베딩 등)
3) Fast Mask Decoder (Transformer Decoder 변형)
- 거대한 데이터셋(10억+ 마스크, SA-1B)을 학습하여 다양한 객체 인식이 가능해졌습니다.
-
SAM 2
- 비디오에서의 segmentation을 위해 Memory Attention 및 Memory Bank 구조가 추가
- 프레임 간 객체의 연속적/맥락적 정보를 활용해, 시공간에 걸친 물체 인식을 수행
- 마스크가 일시적으로 사라질 수 있는 동영상 상황을 고려하여, 점수(Confidence) 기반 출력도 유연하게 처리
-
기존 모델과의 차별성
- YOLO, U-Net 등도 객체 인식/분할에 강점을 지니지만,
- 비디오 전체 맥락 반영이 제한적이거나
- 특정 분야(의학 등)에 특화된 경우가 많아
- 범용적인 foundation model로서 즉각적인 zero-shot 적용이 어려웠습니다.
- SAM 2는 대규모 학습과 프롬프트 유연성을 통해, 다양한 물체를 실시간 추적 가능하게 합니다.
- YOLO, U-Net 등도 객체 인식/분할에 강점을 지니지만,
2. 이론: 뇌과학적 시각 !
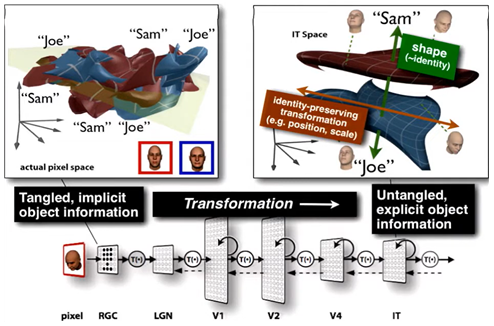
- 인간의 뇌에서, 시각 정보는 V1-V4, IT 피질을 거치며 단계적으로 처리됩니다.
- 특히, 해마(hippocampus) 는 과거 시각 정보를 저장하고, 이를 통해 현재와 미래의 객체 위치를 예측하는 역할을 합니다.
- 본 연구에서의 SAM2 + 실시간 추적 알고리즘 역시, 과거 프레임(메모리) 정보를 참조해 현재 객체의 위치를 추론하고 서보모터를 제어합니다.
- 이렇게 Attention 메커니즘과 Memory Bank를 통해, 뇌가 시각 정보를 처리하고 단기-장기 기억을 전이하는 과정(시냅스 가소성, 시스템 통합 등)을 부분적으로 모사하고 있습니다.
3. 구현 개요
Language / Tool / OS
- Language: Python 3.x
- Framework/Tool: PyTorch, OpenCV, Arduino IDE
- OS: Ubuntu 22.04 LTS
Hardware
- MG996R 180도 서보모터 (2개)
- Arduino로 모터 제어 신호 전송
- PCA9685 Servo Driver
- USB 웹캠 (일반 Logitech C920 또는 equivalent)
- 3D 프린팅된 거치대로 웹캠 장착
4. 결과

- 실시간으로 SAM2 모델을 통해 분할된 객체가 화면 중앙에 오도록 웹캠을 2축 서보모터로 제어 가능
- (추가로 빠르게 움직이는 물체에 대한 추적 안정성 및 유연한 Prompt 입력 가능)
기타 정보
- 프로젝트 GitHub: RealTime-SAM2-Tracker-Camera Repository
주요 기능 및 데모
아래 데모 영상(YouTube)에서는 마우스 클릭으로 객체를 선택하면, 초록색 마스크가 뜨고 물체가 화면 중앙으로 이동하도록 서보모터가 구동되는 모습을 확인할 수 있습니다.
- 사용자 Prompt:
- 마우스 클릭 시
click_points리스트에 좌표 저장 → SAM2 인퍼런스 → 마스크(Mask) 예측 - 예측된 마스크의 중심 좌표를 찾아 서보모터를 제어
- 마우스 클릭 시
데모 영상 1: 웹캠 동작 (전체 구조)
데모 영상 2: 사물 추적
데모 영상 3: 사람 추적
고찰 (Discussion)
- 실시간 추적과 뇌과학적 유사성
- 해마(hippocampus)가 과거 시각 정보를 저장하여 현재/미래의 객체 위치를 예측하듯이,
- SAM2의 Memory Bank 구조가 이전 프레임 정보를 통합하고,
- 이를 통해 물체가 일시적으로 가려지거나 사라져도 안정적으로 추적을 유지하는 방식을 구현 가능.
- 서보모터 제어 속도
- 초당 8도 회전은 인간 눈과 비교하면 느릴 수 있으나,
- 실시간 대응에는 충분하여 사용자가 카메라의 시야를 잃지 않도록 구현
- 뇌가 시각 정보를 빠르게 처리하고 반응하는 속도 메커니즘을 어느 정도 모사
- 뇌의 장기 기억 모사 가능성
- 현재 SAM2의 Mask Propagation은 FIFO Queue 기반으로 단기 메모리를 유지하지만,
- 해마의 기억 통합(단기 → 장기)을 모사해, 자주 등장하거나 중요한 객체 정보를 장기 메모리에 저장하면 추적 성능이 한층 상승할 가능성
- 예: 특정 인물(가족, 친구) 등 빈번한 객체는 반복 등장 시 재학습·재추적을 강화
- 모델 구조 제안
- SAM2는 양방향 Transformer 기반 → 실시간성에서 다소 부담
- 단방향 Transformer 구조나 경량화 모델을 적용하면, 추적 속도 & 지연 문제가 개선될 수 있음
결론 (Conclusion)
- 본 연구에서는 Meta의 Segment Anything Model 2 (SAM2) 를 이용해, 사용자 Prompt로 세그멘테이션하고 실시간 추적을 수행하는 Object Tracking Webcam을 구현했습니다.
- MG996R 2축 서보모터와 Ubuntu 22.04 + Python 환경을 활용하여, Prompt → 마스크 예측 → 서보 제어라는 파이프라인을 완성했습니다.
- SAM2의 오픈소스·prompt 기반 특성 덕분에, 특정 데이터셋 없이도 새로운 물체를 쉽게 인식·추적할 수 있음을 확인했습니다.
- 뇌과학적으로 볼 때, Attention·Memory Bank 구조가 시각피질·해마의 역할을 부분적으로 모사하며, 해마의 장기 기억 통합 과정을 도입한다면 더욱 강력한 추적이 가능할 것입니다.
제언 (Proposal)
- 해마의 기억 통합 메커니즘 적용
- Queue 형태 대신, 장기 메모리(중요 객체에 대한 feature 저장) 구조 도입
- 과거에 추적했던 객체를 빠르게 재인식 가능
- 단방향 Transformer
- 비디오 프레임을 순차적으로 처리하는 Online 또는 실시간 환경에서,
- 뒤쪽 정보(미래 프레임)에 대한 Attention 없이도 안정적인 성능을 유지할 수 있도록 경량화 필요
- 적응형 모델 업데이트
- 사용자가 반복적으로 Prompt 하는 객체(즐겨찾는 물체, 반려동물 등)에 대해,
- Online Fine-tuning 또는 Feature Bank 업데이팅을 통해 인식 성능을 향상
Usage
- 프로젝트 클론
git clone https://github.com/sawo0150/RealTime-SAM2-Tracker-Camera.git cd RealTime-SAM2-Tracker-Camera - SAM2 레포지토리 준비
- facebookresearch/sam2 저장소를 로컬에 클론
- 해당 README의 설치 안내에 따라 모델 가중치(.pth) 등을 준비
- 하드웨어 연결
- MG996R 서보모터 2축 (좌우 회전, 상하 회전)
- Arduino + PCA9685 → 모터 제어
- 웹캠 USB 연결
-
메인 스크립트 실행
# Python 측 python3 src/webcam_publisher.py # Arduino 측 # src/arduino/arduino_code_v2/arduino_code_v2.ino 업로드- 웹캠 창이 뜨면, 마우스로 추적할 객체를 클릭
- 선택된 객체(초록색 마스크)가 화면 중앙에 오도록 웹캠(서보모터)이 자동 회전
Notes
- 실시간성을 위해 GPU 환경(CUDA)이 권장됩니다.
- 서보모터와 Arduino 간 시리얼 통신 속도(보드레이트)에 주의해야 합니다.
- 3D 프린팅 STL 파일(웹캠 고정 브래킷 등)은
3D_models/폴더 또는 별도 링크에서 공유가 가능합니다.
References
VII. 참고 문헌 (References)
- Kirillov, A., et al. (2023). Segment Anything. Meta AI Research (FAIR).
https://ai.meta.com/blog/segment-anything-foundation-model-image-segmentation/ - Xu, N., Price, B., Cohen, S., Yang, J., & Huang, T. S. (2016). Deep interactive object selection. CVPR.
- Mahadevan, S., Voigtlaender, P., & Leibe, B. (2018). Iteratively trained interactive segmentation. BMVC.
- He, K., Chen, X., Xie, S., Li, Y., Dollar, P., & Girshick, R. (2022). Masked autoencoders are scalable vision learners. CVPR.
- Dosovitskiy, A., et al. (2021). An image is worth 16x16 words: Transformers for image recognition at scale. ICLR.
- Tancik, M., et al. (2020). Fourier features let networks learn high frequency functions in low dimensional domains. NeurIPS.
- Radford, A., et al. Learning transferable visual models from natural language supervision.
- Ravi, N., et al. (2024). SAM 2: Segment Anything in Images and Videos. Meta AI Research.
https://ai.meta.com/sam2/#our-approach - DiCarlo, J. J., & Cox, D. D. (2007). Untangling invariant object recognition. Trends Cogn Sci.
- facebookresearch/sam2
댓글남기기