팀 프로젝트 - 자율주행 SW 고도화 경진대회 프로젝트 🚗
소개
본 프로젝트는 자율주행과 관련된 다양한 과제를 수행할 수 있는 시스템을 개발하는 것을 목표로 합니다. 이를 위해 기존의 차량을 개조하여 자율주행 시스템을 설계하고 구현합니다. 주요 기능으로는 도로를 따라가는 주행, 차량 추월, 신호 인식, 그리고 주차 기능 등이 포함되어 있습니다.
기간 / 인원, 역할
- 개발: 2024.06 ~ 2024.07.24, 최종 대회: 2024.07.24
- 인원: 2인 팀 프로젝트
- 역할: 전반적인 소프트웨어 개발 (다른 팀원: 차량 개조 - 하드웨어)
Language / Tool (Library) / OS
- Language: Python & C/C++
- Library/Tool: ROS Noetic, TensorFlow, OpenCV
- OS: Ubuntu 20.04 LTS
HardWare
- 대호토이즈 벤츠 NEW GTR AMG 유아전동차

- Sword 노트북 (RTX 3070)
- Arduino Mega
Sensors
- Logitech WebCAM C920 HD PRO x2

- RPLidar A2M12 (2D 라이다) x1

- HC-04 (초음파 센서) x5
- ELB030640 (가변저항, 조향값 체크용) x1
결과
- 금상 수상 (2위)
기타 정보
- 대회 홈페이지: SNU 자율주행 SW 경진대회
- 프로젝트 GitHub: InnoDriver Repository
Task 설명
Task1 – 시간측정경기
- 자율주행차가 트랙을 2바퀴 주행하는 시간을 측정
- 주행 시 차선을 벗어나지 않아야 하고, 차선을 벗어날 경우 점수 삭감 또는 실격 처리됨.
Task2 – 미션수행경기
- 1차선, 2차선의 장애물 회피
- 신호등의 신호 인식 후 횡단보도 구간까지 통과
Task3 – 수직주차경기
- 랜덤으로 주차된 자동차 사이를 인식
- 주차 후 2초 이상 멈췄다가 OUT 지점에 도달
주요 기능 구현 및 알고리즘
Task1 – 시간측정경기
< 시도한 것 >
첫 번째 시도:
-
알고리즘 간략 소개: 주어진 트랙 도면을 활용한 Particle Filter로 Localization, path planning 도전
-
코드: Link

- Warp Transform: 카메라로 받은 이미지를 warp Transform 함
- 트랙 비교: 주어진 트랙과 비교하여 Localization 시도
-
발생한 문제:
- Particle Filter의 연산량이 너무 큼
- 대략적으로 위치를 찾긴 하는데, 정확도가 떨어짐
두 번째 시도:
- 알고리즘 간략 소개: 전방 주시 카메라의 input을 받으면 조향 각도를 output으로 출력하는 딥러닝 모델로 도전 (ResNet 기반)
- 코드: Link
- 데이터 라벨링 영상: 미리 얻은 Data에 조향값을 Labeling
- (-2,-1, 0, 1, 2 중 하나 labiling)
- 주행 영상: 잘 학습이 안된 모습
- 발생한 문제:
- 사람이 이미지에 조향값을 라벨링하다 보니 학습 데이터의 퀄리티가 떨어짐
- 학습이 잘 안됨
세 번째 시도
- 알고리즘 간략 소개: OpenCV의 threshold를 이용하여 1차선, 2차선을 인식하고 Aheading Point를 계산 후, Stanley Path Planning을 사용하여 주행
-
코드: Aheading Link , Stanley Link
- 알고리즘 테스트 영상
- 발생한 문제:
- Threshold 값을 바탕으로 검은색 도로를 인식함
- 트랙 위치마다 조명이 다르기 때문에 하나의 임계값으로 모든 트랙을 잘 인식하지 못함
네 번째 시도 (최종)
- 도로 인식: WarpTransform된 카메라 이미지에서 Unet을 활용하여 1차선, 2차선을 인식합니다.
- Threshold를 찾아내던 방식보다 더 Robust해짐
- Local Path Planning: 인식한 도로와 Bicycle kinematics model을 활용해 만든 mask와 내적하여 최적의 조향 각도를 찾음
- Kinematics를 활용해 조향값을 찾아서 조향 정확도를 높임!
-
코드: Link
- 주행 영상
Task2 – 미션 수행 경기
<장애물 회피>
- 알고리즘 간략 소개:
- Lidar를 활용해 얻은 point를 활용해 장애물 mask를 생성함
- Lidar mask와 도로 segmentation mask를 비교하여 장애물이 1차선에 있는지, 2차선에 있는지 확인하고, 장애물과의 거리를 체크함
-
코드: Link

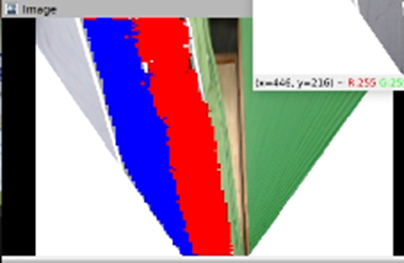
Lidar Mask와 도로 Segmentation Mask
<신호등 인식 & 횡단보도 인식>
- 코드: Link
- 알고리즘 간략 소개:
- 신호등 신호 인식: OpenCV의 HoughCircleP 함수를 활용해 신호등 신호를 인식함
- 횡단보도 신호 인식: Unet을 활용하여 횡단보도를 인식함
- (원래는 Yolo를 활용하고 싶었지만, 모델이 다른 모델이랑 돌리기에는 너무 무거웠고, 잘 학습이 안됐음)
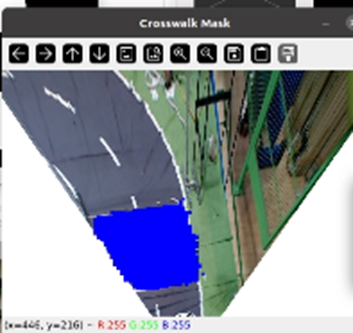
횡단보도 인식한 모습 (Unet)
- 주행 영상
Task3 – 수직주차경기
<수직 주차>
- 알고리즘 간략 소개:
- Rule Based 주차 알고리즘 사용
- (원래 A* path planner를 사용하려 했지만, 시간상 완성하지 못함)
- 알고리즘 과정:
- Lidar 상에서 오른쪽 60도 부근에 장애물을 감지될 때까지 전진
- 장애물 인식 후, 미리 짜놓은 순서에 따라 이동 (time based)
- Rule Based 주차 알고리즘 사용
-
코드: Link
- 주행 영상
최종 결과
최종 결과: 금상 (2위)

댓글남기기